|
|

|
|
|
|
Hi, I’m Anant. I’m a founding research engineer at a stealth startup, working on making robots more capable and general-purpose so they can be part of our daily lives. Previously I worked at 1x Technologies where I was among the first 5 members of the AI team. You can catch some of my past work here. My main intrest lies in Deep Learning, more specifically representation learning and robot-learning.
I also like to work on building scalable software. Previously I was a Graduate Research Assistan at CILVR Lab, NYU, where I worked on problems in Robot Learning, advised by Prof. Lerrel Pinto and Soumith Chintala. In my free time, I like to click photos.
|
|
|
| Master of Science, Computer Science | Sept 2021 - May 2023 |
| New York University, Courant | New York, USA | |
| B.Tech - Information Technology | July 2017-Aug 2021 |
| Indian Institute of Information Technology, Allahabad | India |
|
|
|
|
Research Engineer 1x Technologies | California, USA |
Sept 2023 - Aug 2025 |
| Working with Humanoids to make them capable of working in real-world settings like homes and warehouses | |
|
Graduate Research Assistant CILVR, New York University | New York, USA |
Jan 2022 - Sept 2023 |
| Working on problems in Robot Learning, in collaboration with Hyundai. Specifically in the filed of Imitation Learning, Representation Learning, and Generalizable RL. Advised by Prof. Lerrel Pinto | |
|
Research & Development Intern Temasek Lab, Nanyang Technological University | Singapore |
Jan - June 2021 |
| Lead the development of Meeting Room Speech Recognition Android Application, capable of automatic transcription. Also built image-captioning model using transformer | |
|
Remote Research Assistant CITEC Lab, Bielefeld University | Germany |
2020 - 2021 |
| Using Conflict Based Search (CBD) and Deep-Q learning achieved decent performance on the flatland environment (3rd position in round 1 and 6th position on round 2) |
|
|
|

|
Nur Muhammad Mahi Shafiullah*, Anant Rai*, Haritheja Etukuru, Yiqian Liu, Ishan Misra, Soumith Chintala, Lerrel Pinto submitted to Science Robotics, 2023 project page | code | arXiv In this project, we addressed a key barrier in home robotics, particularly in imitation learning: the lack of affordable and user-friendly tools for collecting robot demonstrations. To solve this, we developed an innovative, cost-effective tool named the Stick using which we compile the 'Homes of New York' (HoNY) dataset, encompassing 13 hours of interactions from 22 NYC homes, complete with comprehensive video and action data. We further proposed the Home Pretrained Representation (HPR), a ResNet-34 model pre-trained on the HoNY dataset using self-supervised learning, to initialize robot policies in new environments. We show that this initialization can beat baseline models in unseen home environments. |
|
Abhishek Padalkar, Acorn Pooley, Ajay Mandlekar, ...Anant Rai, ... Zichen Jeff Cui submitted to ICRA, 2023 project page | code | arXiv This work explores the potential for consolidating robotic learning by developing "generalist" X-robot policies adaptable across various robots, tasks, and environments. Traditionally, robotic learning involves training separate models for each application, robot, and environment. We are able to show that training on largescale diverse robotic dataset can be used to learn general skill like better spatial understanding in both the absolute and relative sense, generalization to unseen objects and overall a much more robust model that can beat baselines trained on robot-specific/task-specific data only |
|
Siddhant Haldar*, Jyothish Pari*, Anant Rai, Lerrel Pinto won best student paper award at RSS, 2023 project page | code | arXiv In this work, we present Fast Imitation of Skills from Humans (FISH), a new imitation learning approach that can learn robust visual skills with less than a minute of human demonstrations. Given a weak base-policy trained by offline imitation of demonstrations, FISH computes rewards that correspond to the “match” between the robot’s behavior and the demonstrations. Along with beating the state-of-art, FISH is versatile, which allows it to be used across robot morphologies (e.g. xArm, Allegro, Stretch) and camera configurations |
|
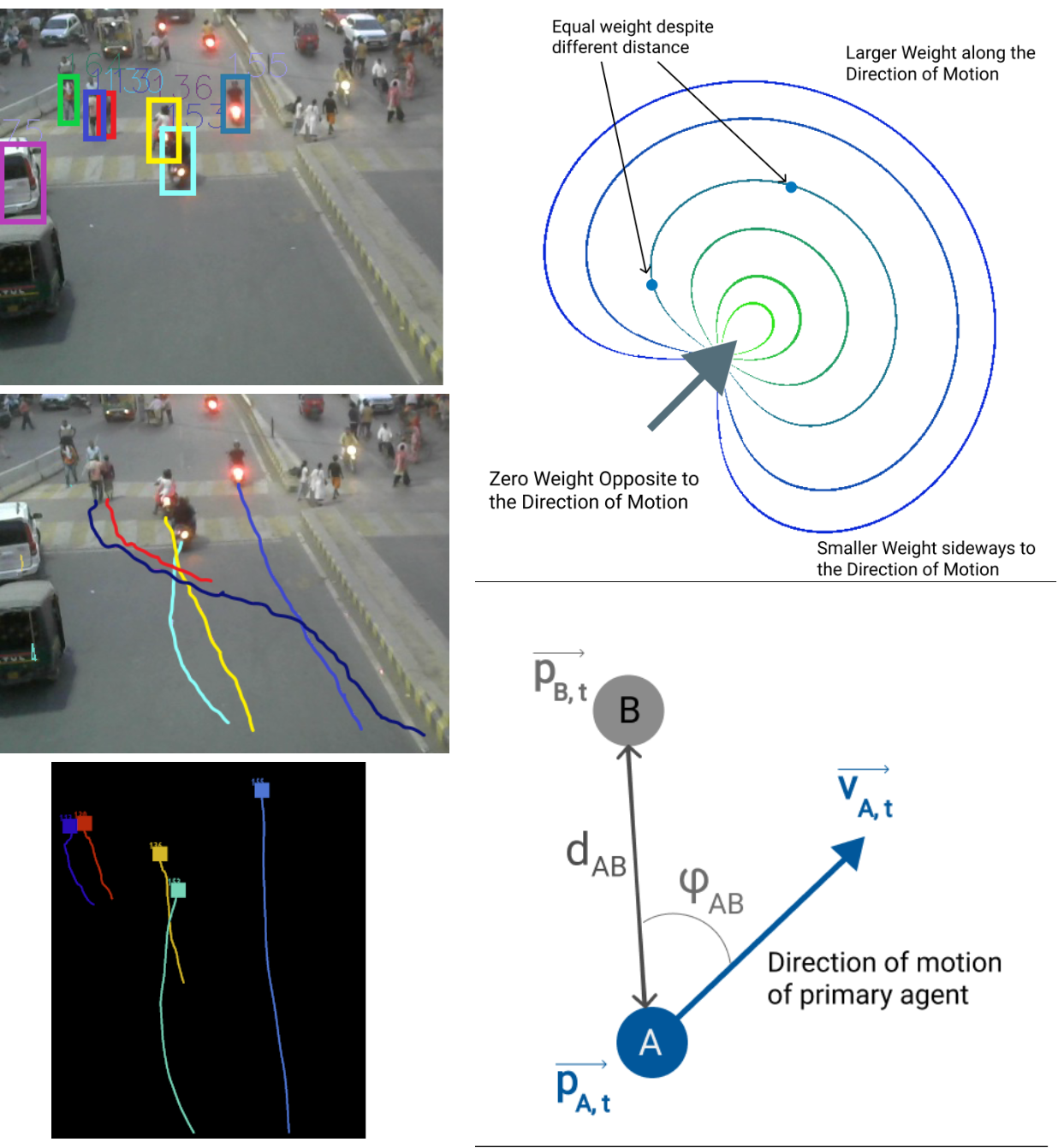
Rahul Jha*, Anant Rai*, Rahul Kala IEEE ITSC, 2022 paper Built a module using SSD (45 mAP) and SORT to detect and track agents in novel video dataset of Indian Traffic. Developed special LSTM based network architecture to learn the agent’s behaviours and interactions for trajectory prediction in dense heterogeneous traffic. Devised Weighted-Elliptical-Model for risk modelling and combined it with trajectory prediction to get novel predictive-risk-analysis (20% improvement over baseline) |
|
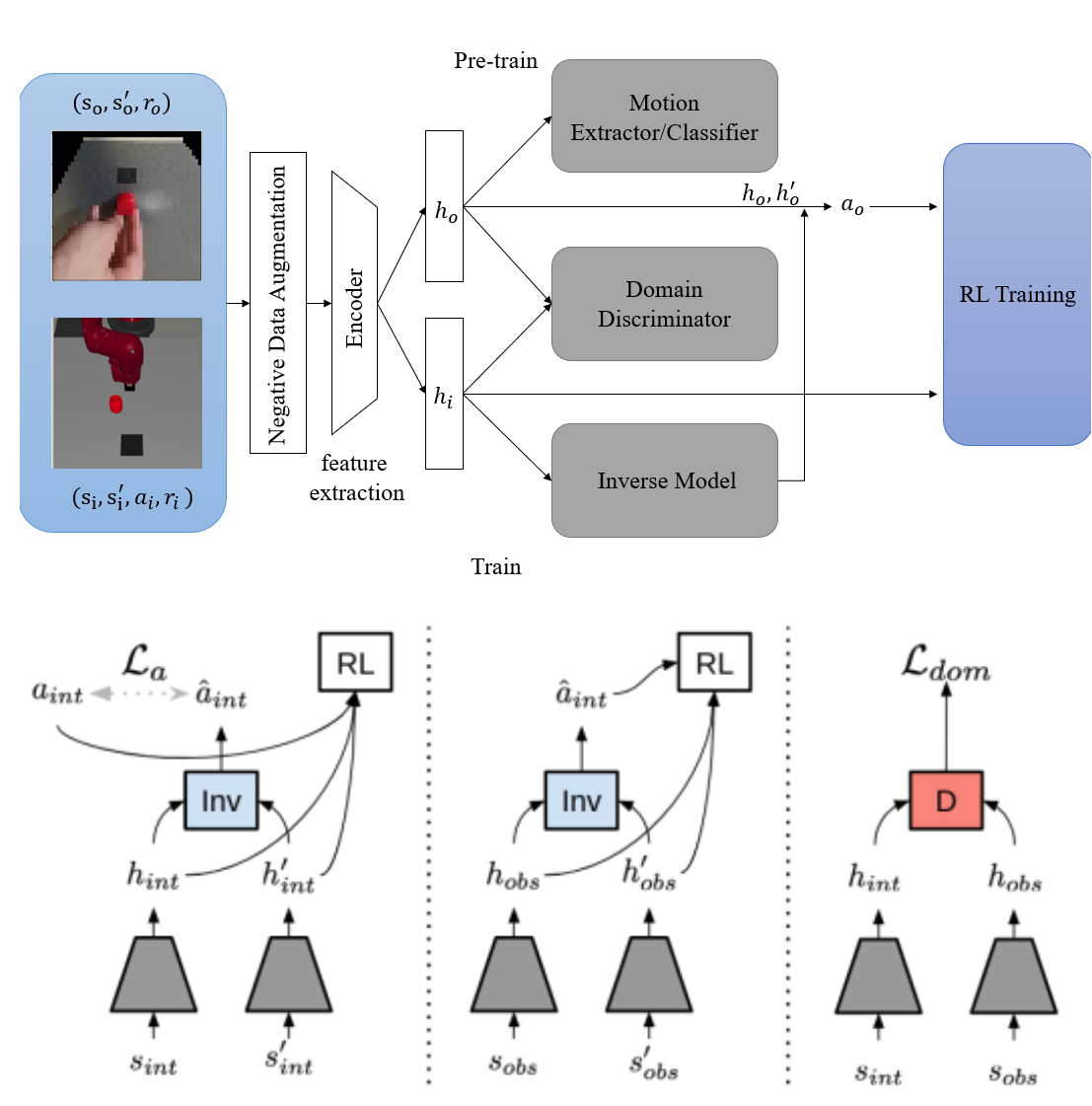
Anant Rai*, Umang Sharma*, Xu Cao* code | pdf Unlabelled videos of humans are a large and almost untapped source of data for robots to learn several routine tasks. The paper RLV proposes a framework that can leverage such videos to enhance learning of challeneging vision-based tasks. The drawback to their model is that it can be extremely unstable and lead to a lot of zero reward rollouts. In our work, we make the framework more robust by adding motion understanding module to stabalize cross domain adaption using discriminator. In our experiments on the task of Visual Puahing, we see our framework doing better than the RLV (15% improvement in performance) |
|
Luca Hermes, Anant Rai, Andre Melnik code Devised optimal environment representation using trees and graphs for intelligent cost calculation and re-routing decisions in the environments of NeurIPS2021: Flatland challenge . Using Conflict Based Search (CBD) and Deep-Q learning achieved decent performance on the environment (3rd position in round 1 and 6th position on round 2) |
|
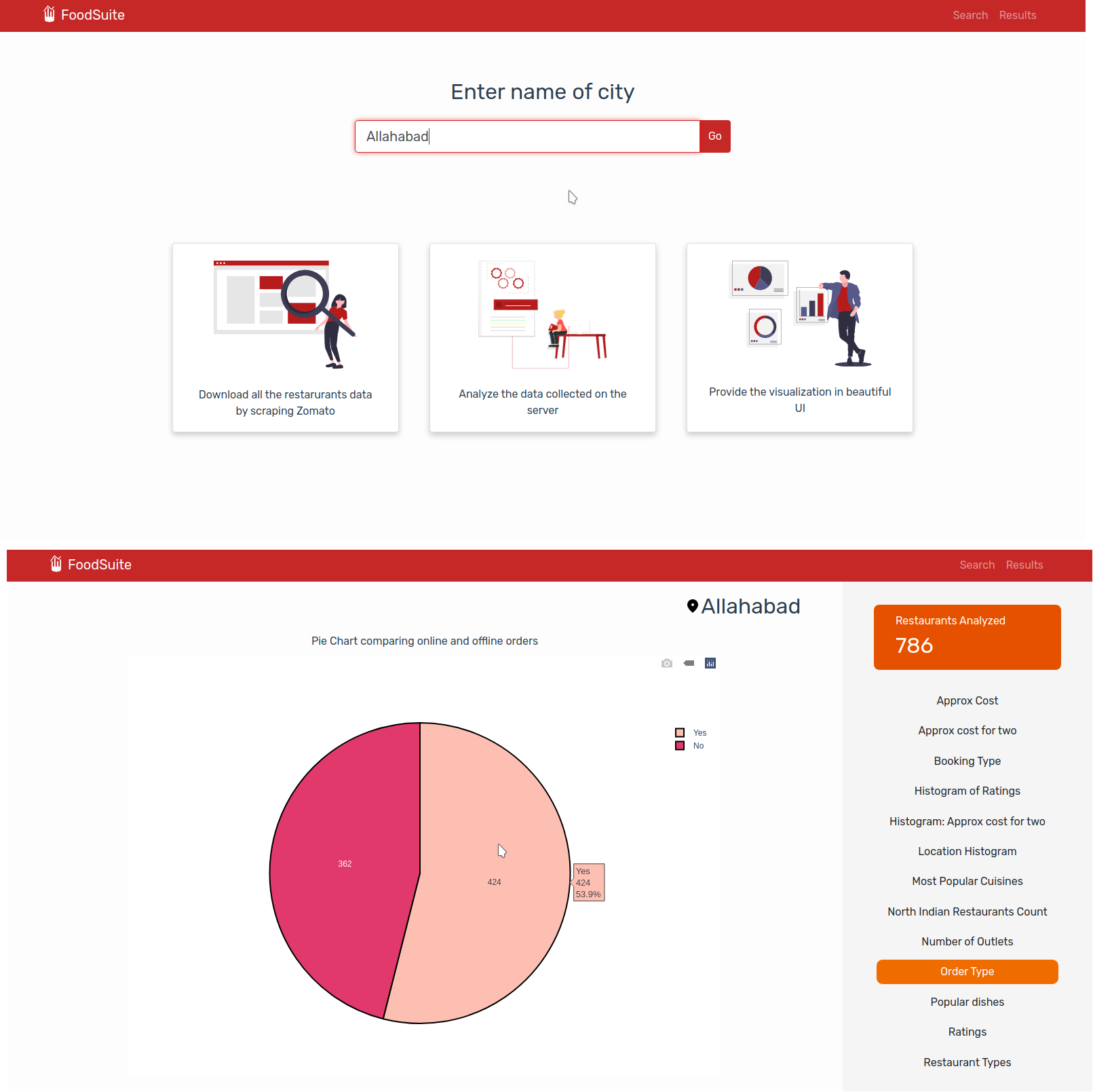
Tinku Singh1, Ashwin Raut2, Dhruv Agarwal3, Rahul Jha4, Anant Rai5, Manish Kumar6 ICAIR, 2020 code | pdf Used Data Mining and an array of Deep Learning techniques like Collaborative filtering, NN classifier and Sentiment Analysis to analyse and capture food habits of Indian customers. Collected and organised data from food giants like Swiggy and Zomato on a flask-server, for analysis and predictions based on location, and presented results on a web-app created using Node Js. |